打开文本图片集
摘要:针对纯方位单站目标跟踪中观测方程非线性且易受滤波初值影响的问题,提出了一种距离参数化混合坐标系下的平方根容积卡尔曼滤波(SRCKF)算法。该滤波算法首先将平方根容积卡尔曼滤波算法应用于混合坐标系,比直角坐标系下的平方根容积卡尔曼滤波算法能得到更好的跟踪效果;接着将距离参数化思想和混合坐标系下的平方根容积卡尔曼滤波算法结合,消除了距离信息不可测对跟踪效果的影响。仿真结果表明,该滤波算法虽略微提升了计算复杂度,但其鲁棒性和滤波精度均有大幅度的提高。
关键词:纯方位跟踪;混合坐标系;距离参数化;平方根容积卡尔曼滤波;鲁棒性
中图分类号: TP391.4 文献标志码:A
Abstract:In order to solve the problems of having nonlinear observation equations and being susceptible to initial value of filtering in bearingsonly target tracking, a rangeparameterized hybrid coordinates Square Root Cubature Kalman Filter (SRCKF) algorithm was proposed. Firstly,it applied the SRCKF to hybrid coordinates,obtained better tracking effect than the SRCKF under Cartesian coordinates. And then it combined the range parameterization strategy with the SRCKF under hybrid coordinates, and eliminated the impact of unobservable range. The simulation results show that the proposed algorithm can significantly improve the accuracy and robustness although the computational complexity increases slightly.
Key words: bearingsonly tracking;hybrid coordinates;range parameterization;Square Root Cubature Kalman Filter (SRCKF);robustness
0 引言
纯方位目标跟踪利用运动目标本身的有源辐射,获取目标的角度信息序列实时估计目标的运动状态[1]。由于纯方位目标跟踪仅需要目标的角度信息,具有隐蔽性强、设备简单、探测距离远等优点,在电子侦察、精确制导、智能导航和电子对抗等领域具有广泛应用[2-3]。由于传感器的观测量仅有目标的角度信息,无法获取目标的径向距离信息,观测量是状态量的非线性函数,因此纯方位目标跟踪实质上是一个非线性滤波问题。目前纯方位目标跟踪的研究热点主要集中在:滤波算法的研究和坐标系的选择。
滤波算法方面,扩展卡尔曼滤波(Extended Kalman Filter,EKF)[4]将非线性函数进行一阶泰勒展开,忽略高阶项,将非线性问题线性化,由于计算简易使其获得广泛应用。然而对于高度非线性问题,使用EKF会产生较大的误差,甚至导致滤波发散,且EKF在线性化时需要计算Jacobian矩阵,实际问题中很难得到系统的Jacobian矩阵。针对EKF的不足,文献[5]提出无迹卡尔曼滤波(Unscented Kalman Filter,UKF),通过一组确定的加权采样点来逼近随机变量的分布函数,通过采样点的非线性变换,捕获随机变量经非线性变换后的统计特性。但UKF在进行迭代滤波过程中需要进行矩阵分解和求逆运算,而状态估计协方差阵难以保持正定。文献[6]提出容积卡尔曼滤波(Cubature Kalman Filter,CKF),使用基于容积原则的数值积分方法计算非线性变换后的随机变量均值和协方差。与UKF相比,CKF需要较少的计算量且具有更高的滤波精度; 但CKF在迭代滤波过程中需要对误差协方差矩阵进行分解和求逆,而误差协方差阵的非正定造成滤波数值的不稳定。文献[7]针对CKF的不足,提出平方根容积卡尔曼滤波(Square Root Cubature Kalman Filter,SRCKF),与CKF相比,其在滤波过程中直接以协方差阵的平方根形式进行迭代更新,避免了协方差矩阵的分解和求逆运算,提高了滤波的收敛速度和数值稳定性。
坐标系的选择方面,由于在直角坐标系下纯方位目标跟踪的观测量是状态量的非线性函数,采用卡尔曼滤波器进行纯方位目标运动分析是不稳定的,甚至会导致滤波器发散[8]。近年来讨论较多的是修正球坐标下的卡尔曼滤波算法[9],该算法可实现观测量和不可观测量之间的自动解耦,防止协方差矩阵的病态且使得状态估计渐进无偏,但其状态方程是高度非线性及强耦合的,不利于进行状态预测。本文结合直角坐标系和修正球坐标系各自的优缺点,选择在混合坐标系(Hybrid Coordinates, HC)下进行滤波,即将滤波算法运用于直角坐标系和修正球坐标系两个坐标系中。
此外,在纯方位目标跟踪中,滤波初始值对跟踪效果影响较大,而由于无源传感器无法获取目标径向距离信息,使得目标初始距离存在较大误差,进而影响跟踪精度[10]。
针对以上问题,本文提出距离参数化混合坐标系下的平方根容积卡尔曼滤波(Range Parameterized Hybrid Coordinates Square Root Cubature Kalman Filter, RPHCSRCKF)算法,将距离参数化思想与混合坐标系下的平方根容积卡尔曼滤波(Hybrid Coordinates Square Root Cubature Kalman Filter, HCSRCKF)相结合,将目标初始距离划分为若干个子区间,并对各子区间分配初始权值,在每个子区间独立并行滤波并更新权值,最后将各子区间的滤波结果加权融合作为最终的状态估计。
1 直角坐标系下纯方位目标跟踪
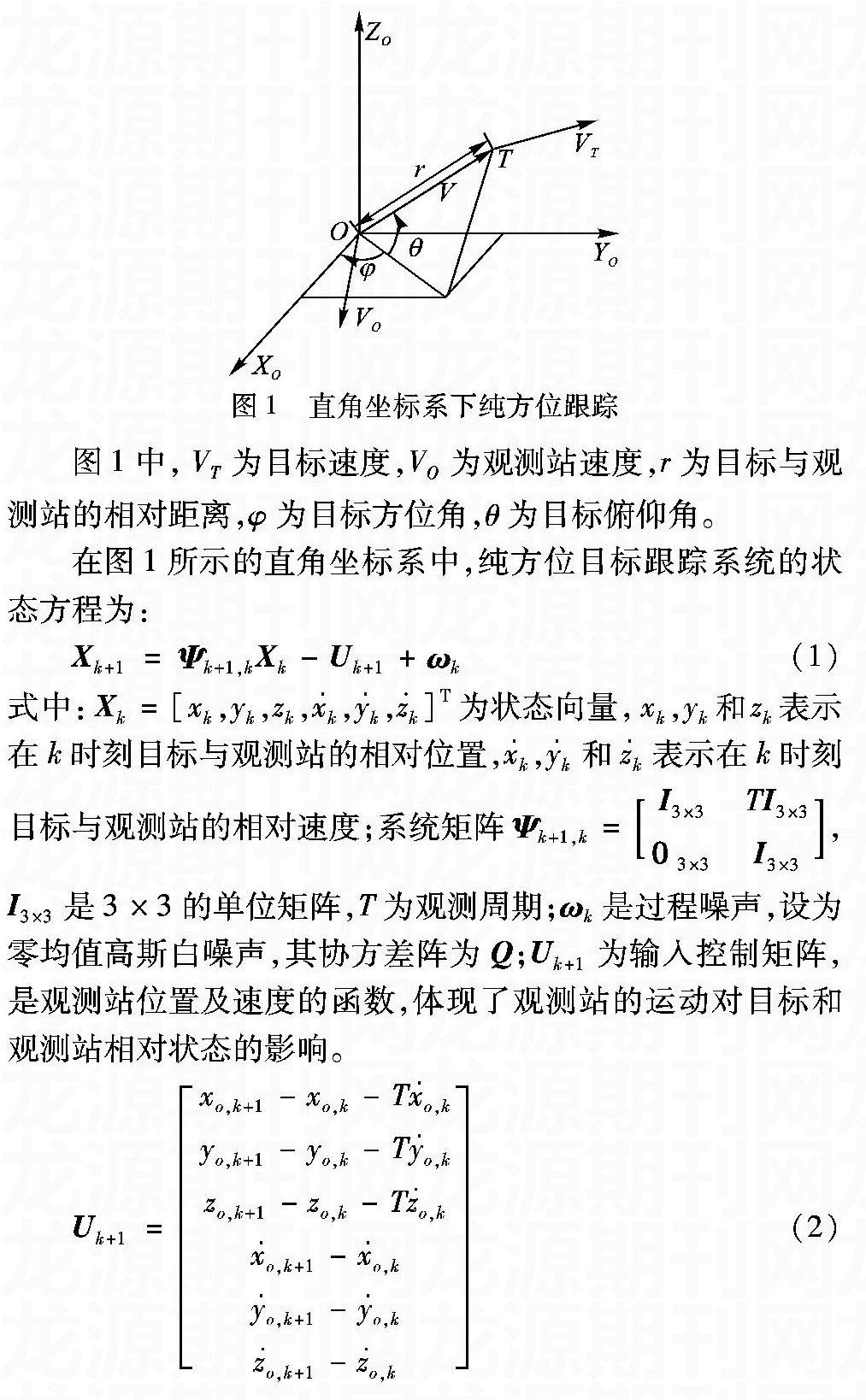
假设在三维空间中,存在一个搭载红外传感器的移动观测站,定位对象为单个已知其运动模式的运动目标,以观测站为原点建立直角坐标系进行分析,如图1所示。纯方位目标跟踪是在观测站做机动实现对目标的可观测前提下,利用观测获得的角度信息估计出目标的状态信息,如位置和速度等。
式(1)和式(5)构成了直角坐标系下纯方位目标跟踪的滤波框架,由于观测量和状态量之间的关系是非线性的,直角坐标系下纯方位目标跟踪是一个典型的非线性滤波问题。研究表明,在直角坐标系中采用卡尔曼滤波器进行纯方位目标运动分析是不稳定的,甚至会导致滤波器发散[8]。
2 混合坐标系下纯方位目标跟踪
为了克服在直角坐标系下卡尔曼滤波存在的缺陷,有学者提出在修正球坐标系下重新选择系统状态变量,再对新的状态变量进行卡尔曼滤波得到状态估计。修正球坐标系下的卡尔曼滤波是稳定且渐近无偏的,但在修正球坐标系下系统的状态方程是高度非线性及强耦合的,对于机动目标的跟踪会产生较大的误差。
基于直角坐标系和修正球坐标系各自的优缺点,针对纯方位目标跟踪问题,本文提出混合坐标系下的平方根容积卡尔曼滤波算法(HCSRCKF),即将滤波算法运用于直角坐标系和修正球坐标系两个坐标系中。
2.1 修正球坐标系下纯方位目标跟踪
如图2所示,观测站位于运动且无转动的直角坐标系的原点,X轴和Y轴位于水平面,Z轴垂直于水平面向上。目标位于(x,y,z)处,与观测站的距离为r,目标与观测站的连线在水平面的投影为rh,rh与X轴的夹角为目标方位角φ,rh与r的夹角为目标俯仰角θ。θ·为俯仰角的变化率,位于水平面内且垂直于r,ω位于Zr平面内且垂直于r,rθ·ω构成目标视线坐标系。 AtX,AtY和AtZ表示目标在目标视线坐标系中的加速度分量,AmX,AmY和AmZ表示观测站在目标视线坐标系中的加速度分量。
综上所述,混合坐标系下的平方根容积卡尔曼滤波算法(HCSRCKF)流程可归结为:选择修正球坐标系状态向量进行容积点采样,将采样点状态向量转换至直角坐标系进行状态预测,最后转换回修正球坐标系完成卡尔曼滤波更新,滤波过程中状态和协方差在两坐标系之间进行转换。
3 距离参数化
在纯方位目标跟踪中,由于观测站观测到的仅是目标的角度信息,无法获得目标距离信息,如果此时随意设定一个目标距离初始值,当其与真实目标距离相差较大时,将会导致滤波性能变坏甚至发散。为了避免初始目标距离的误差对混合坐标系下平方根容积卡尔曼滤波性能的影响,本文将距离参数化思想与混合坐标系下的平方根容积卡尔曼滤波相结合,提出了距离参数化混合坐标系下的平方根容积卡尔曼滤波算法(RPHCSRCKF)。
RPHCSRCKF算法首先将不可观测的目标距离信息划分为若干个子区间,并对各子区间分配初始权值,取每个子区间的中心值作为HCSPCKF算法的初始距离估计,在每个子区间上独立运行HCSRCKF,依据贝叶斯准则进行权值更新,最后将各子区间滤波结果加权融合作为最终的状态估计。
3.1 距离区间划分
在纯方位目标跟踪中,当观测站接收到目标的回波信号时,此时目标必处于观测站的探测距离内,所以本文将观测站的探测距离区间[Rmin,Rmax]作为目标与观测站的初始距离区间估计。
3.3 距离区间消减
由式(19)和式(20)可知,当某个子区间上滤波器的观测估计值与实际观测值存在很大偏差时,则此子区间的权值将大幅减小。在进行多次权值更新后,部分区间的权值已经变得非常小,表示在这些区间上的状态估计值与实际值的偏差较大,滤波效果不理想。此时应当终止对这些区间继续进行交互运算,可降低系统的计算复杂度。因此设定权值门限为ωth,当有子区间的权值低于此门限时,则终止对应子区间上的滤波器。
至此,距离参数化混合坐标系下的平方根容积卡尔曼滤波算法流程可以归结如下:
步骤1 按式(14)~式(18)划分初始距离区间,并对各子区间分配初始权值;
步骤2 各子区间独立运行HCSRCKF,得到状态估计量和新息协方差矩阵平方根;
步骤3 按式(19)和式(20)更新权值;
步骤4 按式(21)对各子区间的滤波结果进行加权融合;
步骤5 比较子区间权值ωik和权值门限ωth的大小,如果ωik<ωth,则终止第i个子区间对应的滤波器,转至步骤2。
4 仿真及结果分析
为保证观测站对目标持续可观测,假设观测站机动飞行跟踪地面匀速直线运动目标,观测站初始位置为[0,0,0],初始速度为28.284m/s,初始航向角为0.25π,初始俯仰角为0,在水平面内以角速度-0.005rad/s持续做匀速转弯运动;目标初始位置为[2000,2000,-1000],速度为50m/s,航向角为0.3π,在地平面做匀速直线运动。过程噪声为零均值高斯白噪声,各坐标轴方向位置标准差为0.5m,速度标准差为0.01m/s2。目标与观测站真实运动轨迹如图3所示。
假设观测站的探测距离区间为[1000m,32000m],取比例因子ρ=2,则可将距离区间划分为5个独立的子区间,即[1000m,2000m],[2000m,4000m],[4000m,8000m],[8000m,16000m],[16000m,32000m]。观测站跟踪目标时间为800s,观测站观测周期为T=1s,观测噪声为零均值高斯白噪声,方位角与俯仰角标准差均为0.001rad。
在上述条件下,选取滤波初始状态为[1000,1000,-500,10,10,0]T,经过100次蒙特卡洛仿真,得到位置估计相对误差曲线如图4所示,图中dr/r为位置估计相对误差,dr为估计距离误差,r为观测站与目标的距离。可以看出当选取滤波初始距离与真实距离相差不大时,HCSRCKF算法和RPHCSRCKF算法的滤波精度要明显高于SRCKF算法,而RPHCSRCKF算法的滤波精度略高于HCSRCKF算法,但误差的数值波动要明显小于HCSRCKF算法。
当选取滤波初始状态为[10000,10000,-5000,10,10,0]T,经过100次蒙特卡洛仿真,得到位置估计相对误差曲线如图5所示,可以看出当选取的滤波初始距离与真实距离相差较大时,由于RPHCSRCKF算法不受初始距离选取的影响,RPHCSRCKF算法的滤波精度和收敛速度均要明显优于HCSRCKF算法和SRCKF算法。
5 结语
针对纯方位目标跟踪问题,本文提出了一种距离参数化混合坐标系下的平方根容积卡尔曼滤波算法,将距离参数化思想与混合坐标系下的平方根容积卡尔曼滤波相结合,有效避免了滤波初始值对纯方位目标跟踪性能的影响,且混合坐标系下的平方根容积卡尔曼滤波算法结合了直角坐标系和修正球坐标系二者的优点,比直角坐标系下的平方根容积卡尔曼滤波算法具有更好的滤波效果。仿真结果表明,本文提出的RPHCSCKF算法虽然计算量有所增加,但抗噪声能力明显增强,在不理想的初始状态下仍可以实现有效跟踪,其鲁棒性和滤波精度较其余滤波算法均有较大幅度的提高。
参考文献:
[1] SONG T L. Observability of target tracking with bearingonly measurements[J]. IEEE Transactions on Aerospace and Electronic Systems,1996, 32(4): 1468-1471.
[2] WANG J, BAO F, ZHANG S.Passive detection and tracking radar systems technology and development[J].Radar Science and Technology, 2004, 2(3):129-135.(王俊,保锋,张守宏.无源探测系统与跟踪雷达系统技术及其发展[J].雷达科学与技术,2004, 2(3):129-135.)
[3] HATEM H, KUTLUYIL D.Passive localization of scanning emitters [J].IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(2): 944-951.
[4] AIDALA V J.Kalman filter behavior in bearingonly tracking application[J]. IEEE Transactions on Aerospace and Electronic Systems,1979,15(1):29-39.
[5] JULIER S J, UHLMANN J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004,92(3):401-422.
[6] IENKARAN A, SIMON H. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6):1254-1279.
[7] HAO Y, YANG J, CHEN L, et al. Square root cubature Kalman filter[J]. Journal of Projectiles Rockets Missiles and Guidance, 2012,32(2):169-172. (郝燕玲,杨峻巍, 陈亮, 等. 平方根容积卡尔曼滤波器[J].弹箭与制导学报,2012,32(2):169-172.)
[8] LI W, YANG Y, HOU J. Bearingsonly tracking algorithm performance analysis based on infrared sensor [J]. Journal of Northwestern Polytechnical University, 2014,32(3):383-393. (李伟, 羊彦,侯静. 基于红外传感器方位跟踪算法的性能分析[J].西北工业大学学报, 2014,32(3):383-393.)
[9] DING G, FENG X. Infrared target tracking based on modified spherical coordinates[J]. Modern Defense Technology, 2007, 35(5):101-104. (丁光庆,冯新喜.基于修正球坐标的红外目标跟踪[J].现代防御技术, 2007, 35(5):101-104.)
[10] PEACH N.Bearingsonly tracking using a set of range parameterized extended Kalman filters[J].IEEE Proceedings of the Control Theory Application,1995,142(1):73-80.
[11] KARLSSON R, GAUSTAFSSON F.Recursive Bayesian estimation:bearingonly applications[J].IEEE Proceedings of Radar, Sonar and Navigation,2005,152(5):305-313.
[12] KOZICK R J, SADLER B M. Source localization with distributed sensor arrays and practical spatial coherence[J]. IEEE Transactions on Signal Processing,2004,52(3):601-616.